Configuration and Troubleshooting
Looking for parameter tuning (thresholds, epochs, architecture, rule count/quality)? That all lives in the Parameter Tuning Guide.
GPU Usage
The device parameter in train() can be used to run Aerial on GPU. Note that Aerial only uses a shallow Autoencoder
and therefore can also run on CPU without a major performance hindrance.
Furthermore, Aerial will also use the device specified in train() function for rule extraction, e.g., when performing
forward runs on the trained Autoencoder with the test vectors.
from aerial import model, rule_extraction
from ucimlrepo import fetch_ucirepo
# a categorical tabular dataset
breast_cancer = fetch_ucirepo(id=14).data.features
# run Aerial on GPU
trained_autoencoder = model.train(breast_cancer, device="cuda")
# during the rule extraction stage, Aerial will continue to use the device specified above
result = rule_extraction.generate_rules(trained_autoencoder)
print(f"Mined {result['statistics']['rule_count']} rules on GPU")
Logging Configuration
Aerial source code prints extra debug statements notifying the beginning and ending of major functions such as the training process or rule extraction. The log levels can be changed as follows:
import logging
import aerial
# setting the log levels to DEBUG level
aerial.setup_logging(logging.DEBUG)
...
Using a Custom Autoencoder
The autoencoder parameter of train() accepts your own Autoencoder implementation, as long as the last layer
matches the original version (see the paper or the source code).
Note: PyAerial trains with a masking objective — each batch randomly corrupts a subset of features to a uniform “unknown” distribution and the Autoencoder learns to reconstruct them from the remaining unmasked features (bounded by
min_unmasked_features/max_unmasked_features). This replaces the Gaussian-noise-based denoising of the original Aerial+ paper — see How Aerial Works for details.
Getting Help
If Aerial produces error messages, please create an issue in the GitHub repository with the error message.
For tuning problems (“no rules”, “too many rules”, “takes too long”), see When Things Don’t Work in the Parameter Tuning Guide.
Advanced: Boosting Rule Quality with Tabular Foundation Models
For domains with limited data—such as gene expression datasets with thousands of features but only dozens of samples—traditional rule mining algorithms struggle to discover meaningful patterns. Aerial addresses this challenge by enabling transfer learning in knowledge discovery, a paradigm shift from conventional algorithmic methods like Apriori, FP-Growth, and ECLAT that inherently lack this capability.
The Challenge: High-Dimensional Small Tabular Data
In specialized domains (biomedical research, rare disease analysis, materials science), practitioners often face extreme dimensional imbalance where the number of features far exceeds available samples. Classical ARM algorithms fail in these settings because they cannot leverage knowledge from related domains. Aerial overcomes this limitation by incorporating tabular foundation models—neural networks pre-trained on diverse tabular datasets—that transfer learned representations to discover high-quality rules even from scarce data.
Transfer Learning Strategies in Aerial
Aerial supports two fine-tuning strategies to adapt foundation models for rule mining:
1. Weight Initialization (WI)
The foundation model’s pre-trained weights initialize Aerial’s autoencoder, preserving learned feature relationships while adapting to the specific rule mining task. This strategy enables the model to leverage patterns from large-scale pre-training while specializing for the target domain.
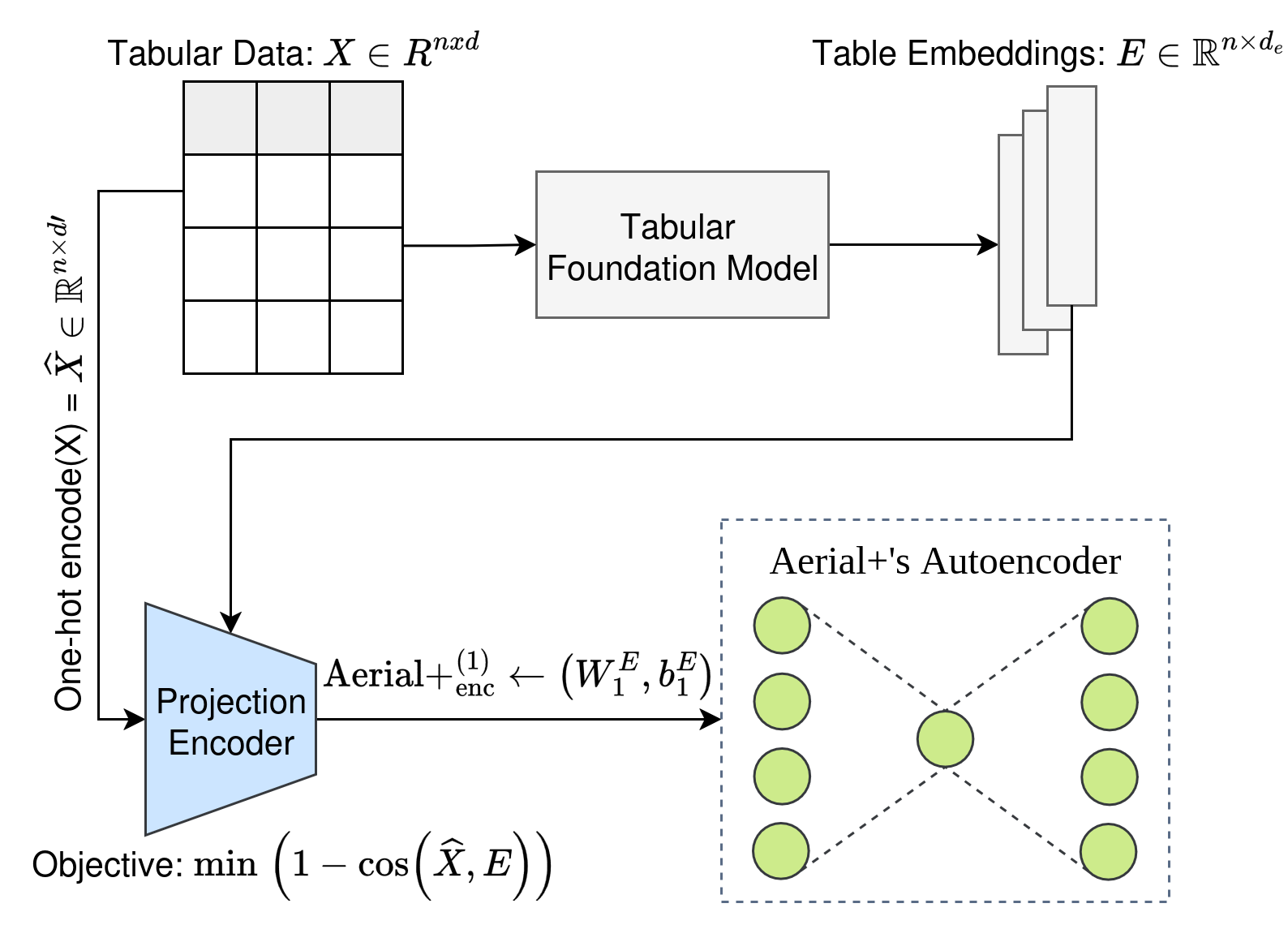
2. Projection-Guided Fine-Tuning via Double Loss (DL)
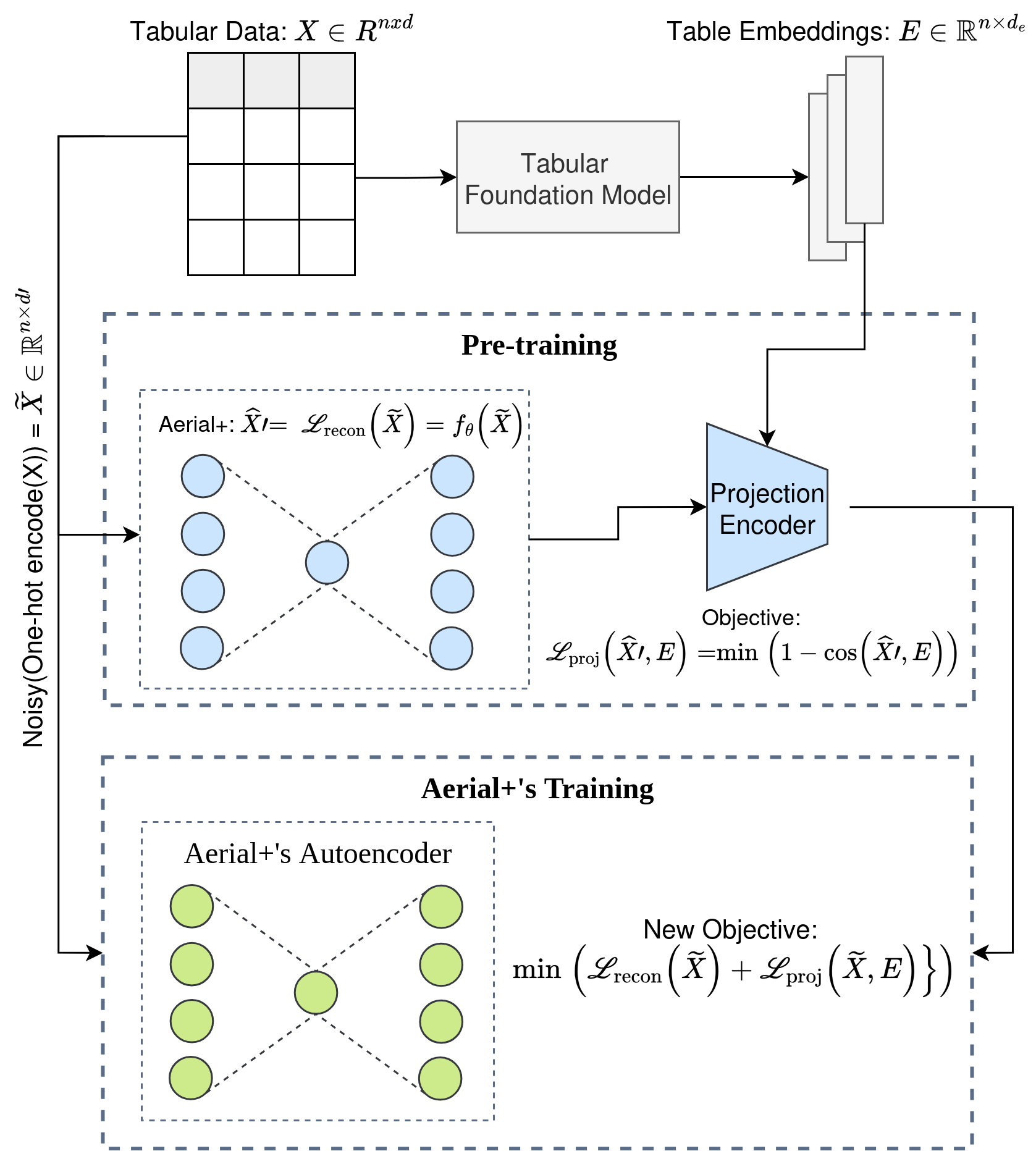
This strategy uses a projection encoder to align Aerial’s autoencoder reconstructions with embeddings from a tabular foundation model (e.g., TabPFN), jointly optimizing two complementary objectives:
Reconstruction loss (L_recon): Binary cross-entropy loss ensuring the autoencoder accurately reconstructs the original tabular data
Projection loss (L_proj): Cosine distance loss aligning the autoencoder’s representations with the foundation model’s meta-learned embedding space
The combined double loss function is: L(θ) = L_recon + L_proj
By optimizing both objectives simultaneously, this strategy encourages the autoencoder to not only reconstruct the input data but also produce representations that are semantically consistent with the foundation model’s learned knowledge, leading to higher-quality rules with better generalization.
Why This Matters
Traditional algorithmic methods operate without learned representations—they mine rules directly from raw data statistics. Aerial fundamentally changes this by:
Leveraging pre-trained models: Enables rule discovery from small specialized datasets by transferring knowledge from foundation models
Enabling cross-domain transfer: Knowledge learned from diverse tabular data transfers to new domains, even with minimal samples
Improving rule quality: Foundation models capture semantic relationships that pure algorithmic methods miss in low-data regimes
Implementation Note
Important: PyAerial does not yet provide out-of-the-box support for tabular foundation model integration. To use these transfer learning strategies, you will need to implement them yourself by:
Following the methodology described in Karabulut et al. (2025)
Referring to the implementation in the paper’s companion repository
Adapting Aerial’s autoencoder architecture to incorporate the weight initialization or double loss strategies
The paper provides comprehensive implementation details and the repository contains reference code for both fine-tuning approaches. Future versions of PyAerial may include built-in support for these advanced capabilities.